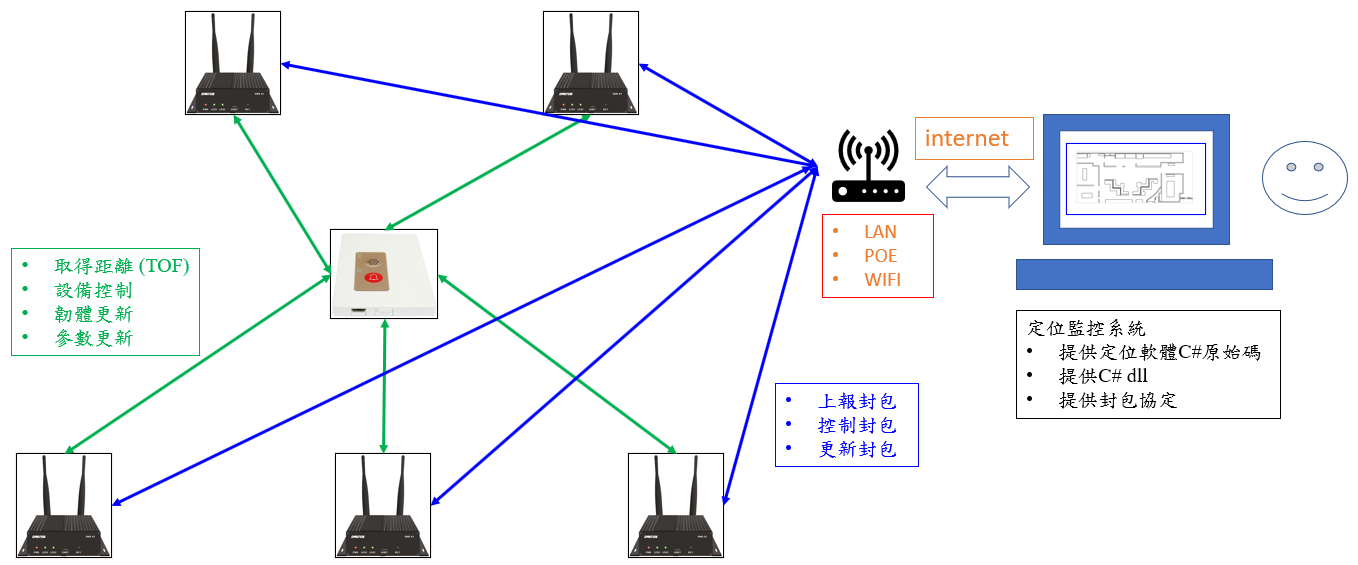
下圖是定位系統的基本架構說明:
一、通訊方式
定位通訊方式
1. 定位卡片發送廣播封包取得與基站距離資訊(TOF)
2. 定位卡片蒐集週圍基站最多五組距離資訊(基照距離及訊號等因素 篩選)
3. 定位卡片發送定位封包給伺服器監控軟體(包含卡片ID、距離、電 量等資料)
4. 定位基站將定位封包傳送回指定的伺服器端IP跟通訊埠
網路通訊方式
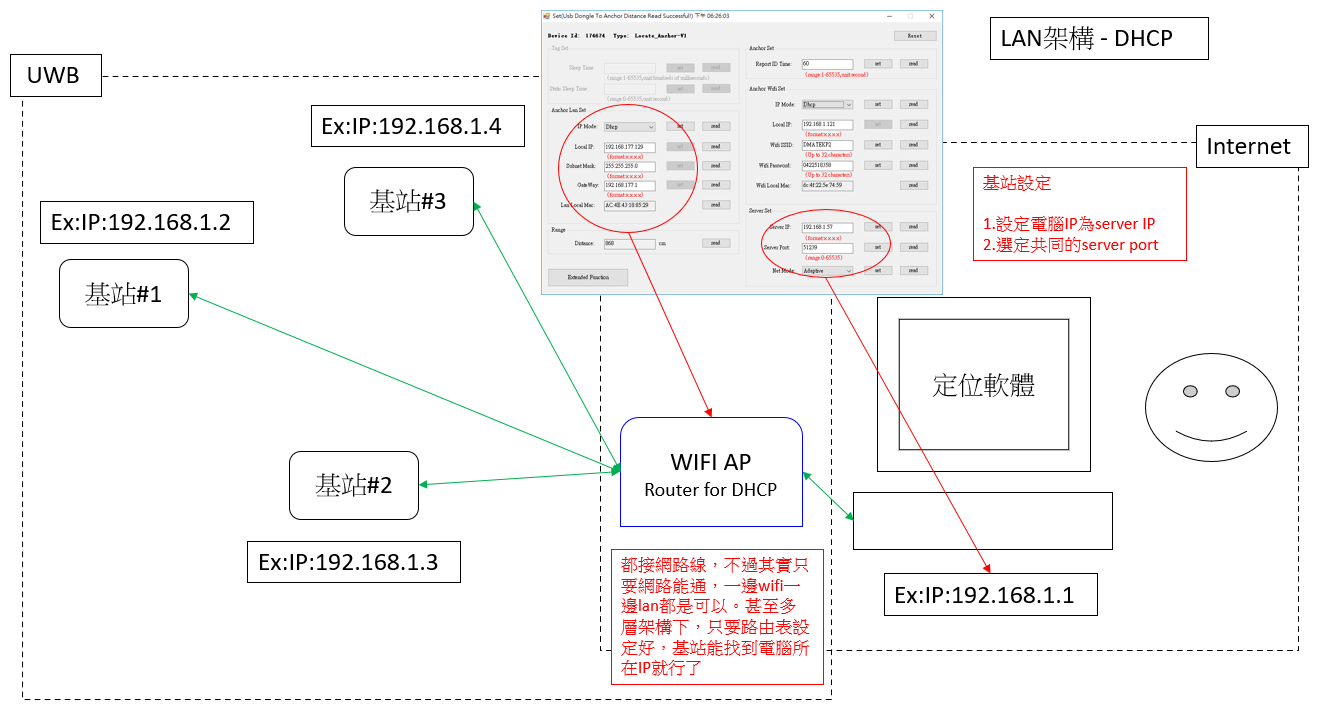
1. 基站設備與後端系統以Socket通訊方式進行UDP封包傳遞
2. 以自定義封包格式傳遞定位以及控制封包
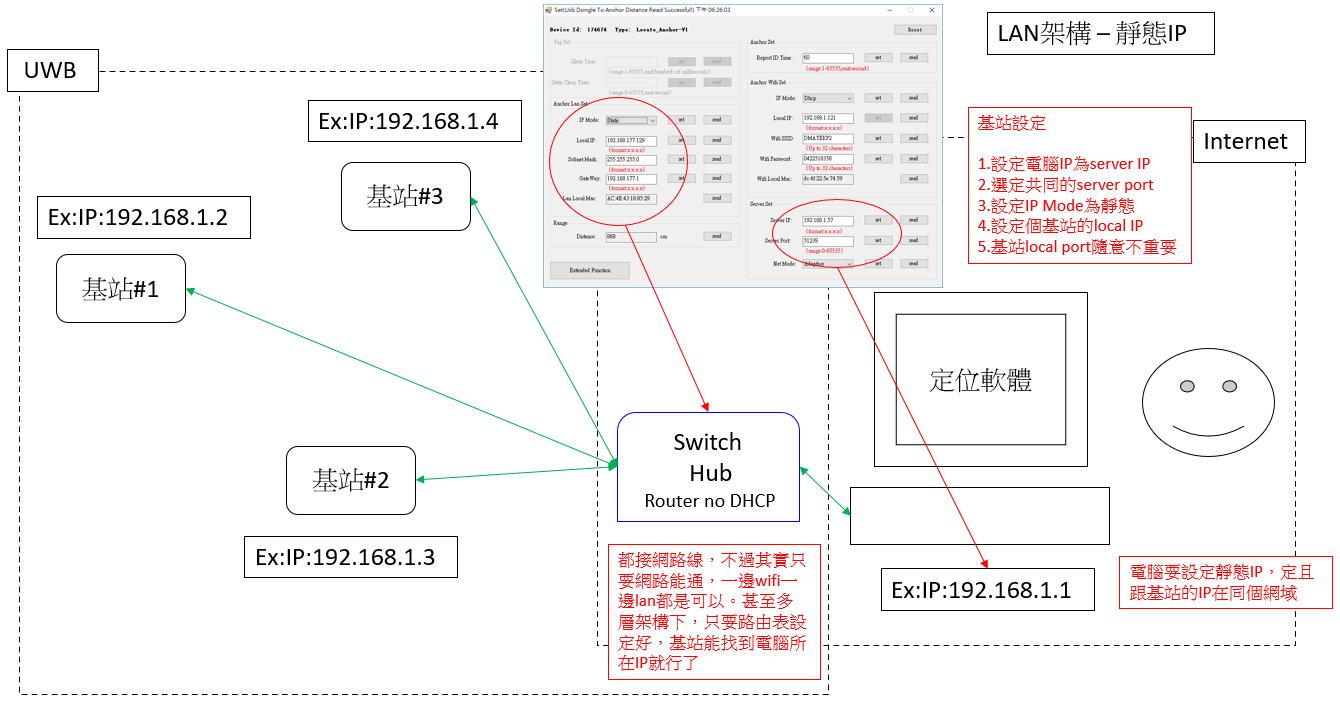
3. 需要指定基站設備的伺服器IP以及通訊埠
4. 基站設備可以透過WIFI以及有線網路方式連上網路
定位系統二次開發
1. 提供網路通訊協定以及封包格式
2. 提供定位軟體C#原始碼
3. dll提供網路監控、設備配置初始化、座標計算、聲光控制等功能 調用
二、 UWB定位架構說明
UWB精準定位網路架構分成兩個部分,一個是定位端的UWB設備通訊,另一個則是網路封包傳遞部分,這個附錄內容會以網路部分為主,以下簡單介紹這兩個網路架構,讓使用者對這個精準定位系統有個基礎認識。
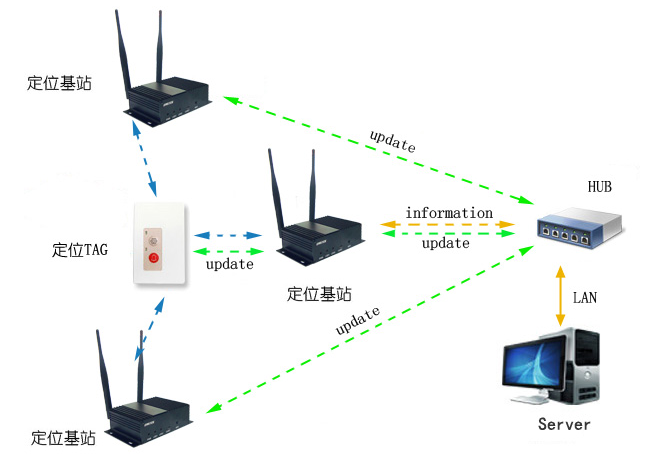
A. UWB網路通訊架構,UWB網路通訊也分成兩個部分
· 定位運作,UWB定位系統運作時,定位卡片會發出UWB廣播封包詢問附近定位定位基站,定位基站若是收到詢問封包則會回覆一個對應的UWB風包給定位卡片,定位卡片藉由這個回覆時間來計算取得與定位基站的距離資訊,這個方式也就是飛行時間測距法(TOF),定位卡片整個測距過程不會超過10ms。取得距離之後,定位卡片會以最短距離及訊號品質為判斷條件,最多發送五個基站距離資料給定位軟體,其中用來傳遞封包的定位基站會是定位卡片所判斷訊號最好或是空閒的基站。
· 設備參數及韌體更新,UWB精準定位系統具備線上更新參數及韌體的機制,定位基站部分是直接跟定位軟體通訊,可以透過網路直接更新。而定位卡片部分不是直接跟定位系統通訊,因此定位卡片的更新資料則會先暫時存在定位基站中,因此UWB定位卡片會定時詢問基站是否韌體更新或是參數更新。這周期大約廿分鐘會發出一次詢問封包,因為設備開機時會先發出詢問封包,所以使用者可以直接重新上電來加速這個更新時間。
B. 網路封包傳遞架構
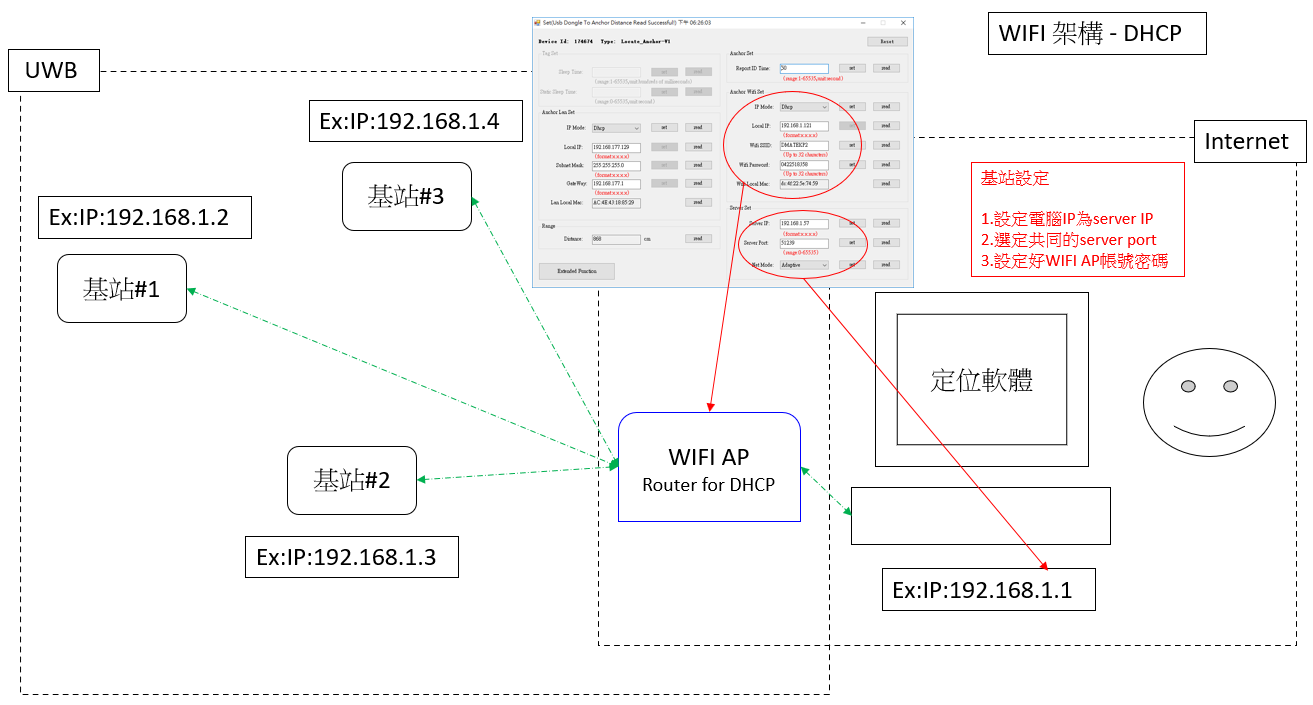
我們這邊是使用Socket協議來傳遞UDP封包,藉此來跟伺服器端的定位軟體溝通,這邊最重要的是定位軟體與定位基站必須可以正常通訊,如果定位基站開機後尋找定位軟體所在的伺服器端電腦失敗,設備功能將不能正常運作。網路中主要會有三種UDP封包進行傳遞
· 基站定時上報封包
· 定位卡片的定位封包,透過定位基站轉發給定位軟體
· 參數及韌體更新封包,這是由設定軟體發出給設備端
【註,另一種主動式定位方式並不透過網路傳送定位資訊,而是如下圖所示是透過串列埠將資料傳出】
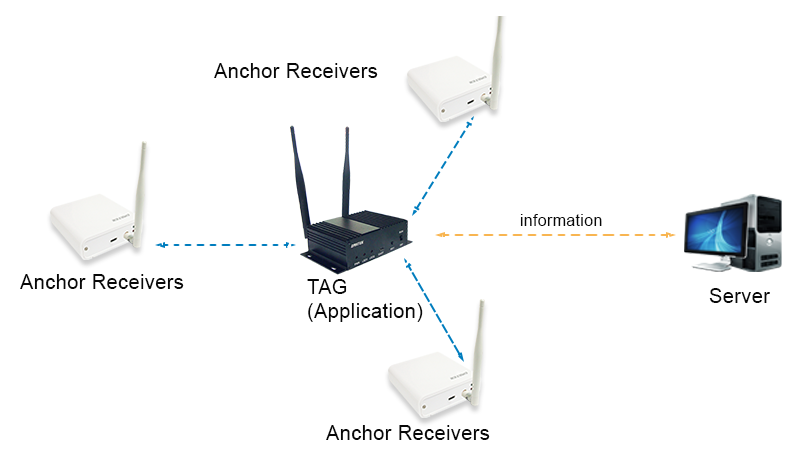
主動式定位在UWB網路通訊架構與標準版一樣,只是Tag更換成UWB-02這種有UART的設備,適用於機械人,AGV,等有CPU主機為處理器的應用定位。
Tag輸出介面

卡片定位信息是通過天線附近的UART/IO口中的TX2輸出的,該信號為TTL電平,需要外接TTL-USB或TTL-232才能連接到PC機。
Tag GND <——> 轉換線GND
Tag TX2 <——> 轉換線RX
二、 跨網域架構說明
下面再來說明一下不同網域下的連接情況:
先來舉例一個網路架構圖:
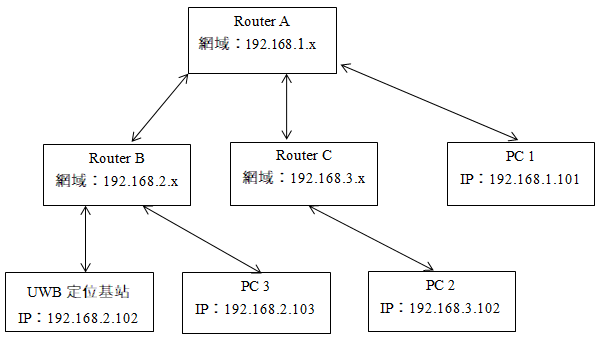
這個情境裡面一共有3個路由器,Router A在最上層,其網域為192.168.1.x,其下面分別連接了2個路由器:Router B和Router C,分別設定的網域是192.168.2.x和192.168.3.x。
在Router B下面連接一個UWB定位基站,它的IP為192.168.2.102
在Router C下面有一台PC 2,他的IP為192.168.3.102。
在Router A下面有一台PC 1,它的IP為192.168.1.101.
在Router B下面有一台PC 3,它的IP為192.168.2.103
以上情境會出現實際上三種可能會遇到的網路結構
第一種情況:
PC3作為Server PC,UWB定位基站和PC3在同一個網域下,使用定位軟體可以直接接收定位。
第二種情況:
PC1作為Server PC,PC1處於UWB定位基站的上一層路由器下面,這個狀況下Router B會不認識PC1的IP可能不會通,不過有些路由器是會將不認識的IP往至往上層送,這個情況就可以能可以順利送往PC1,這邊情況下請先請MIS或是資訊部門進行評估,是否需要要路由表設定或是轉址設定。不過建議以第一種獨立網路為定位網路建立考量。
第三種情況:
PC2作為Server PC,PC2和UWB定位基站處於不同的路由器下面,而且這2個路由器之間沒有上下層的關係,此時連Router都可能不曉得PC2在哪邊,這邊跟第二種狀況一樣,請先跟公司MIS或是資訊部分討論過,再進行定位測試。