Common Q&As
Question 1:
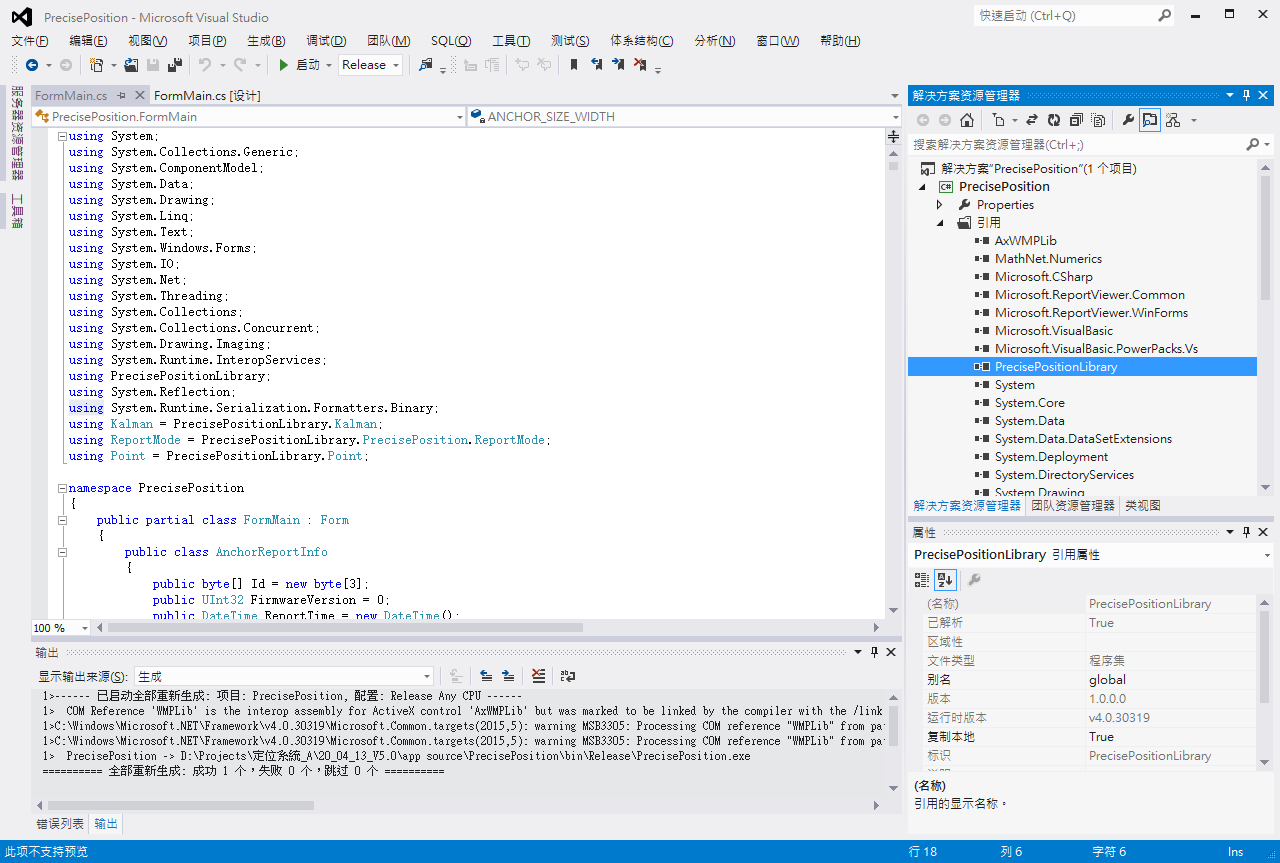
How to accurately open source code of the positioning system? And how to call the dll for positioning
A1:We use visual studio 2012, please use the same version or later version of editor to open C#source code and edit
A2:To call the dll, please refer to it directly, as shown below
Question 2:
How do I get the coordinate value of each tag when a tag is detected in the code? Does this system have a regional restriction?
A1:Particular process as described below
1. The tag will obtain distance information from up to five surrounding anchors. The retrieval of the information is based on the signal strength , closer distance ,etc.
2. The UDP packet containing the distance between the tag information and the anchor is sent back to the server computer through the anchor
3. PrecisePositionLibrary.dll performs packet monitoring and parses the packet
4. PrecisePositionLibrary.dll calculates the positioning coordinates and sends them to the positioning software through a window message
5. The positioning software will display the tag on the map after obtaining the coordinates
A2:There are several characteristics in the positioning
1. Considering the signal strength and packet transmission stability, it is recommended to have at least three anchors within 30m x 30m
2. Because UWB precise positioning is based on the spatial distance algorithm, the positioning range will not be limited to the distance enclosed by the anchor, as long as the Tag can be transmitted to the anchor, the range is the positioning area
3. Our software can set the restricted area. When the Tag enters the restricted area, an alarm message will appear. Of course, user can also use this feature to perform electronic roll call
4. Because UWB is a high-frequency signal, the penetration effect is not good. Therefore, in an environment with too much coverage, more Anchors are needed to supplement the positioning accuracy
Question 3:
Is there any parameters added to the boot batch file(Autoexec.bat), which is equivalent to pressing the start monitoring button to execute automatically after the execution ? Or is there any other tools that can help me to automatically push this button?
A1:This positioning software is not designed with this relative particular mechanism for this positioning software
A2:If the user needs to automatically activate the monitoring function, the user must modify the original code initialization content
Question 4:
The object drifted so significantly during the movement and its more than 1m in accuracy.
A:Drifting or offset is a normal phenomenon. Because our software uses UWB ToF calculation to estimate the coordinate after ensuring measuring the distance. Whenever the object moves there will always have some tiny fluctuation going on.
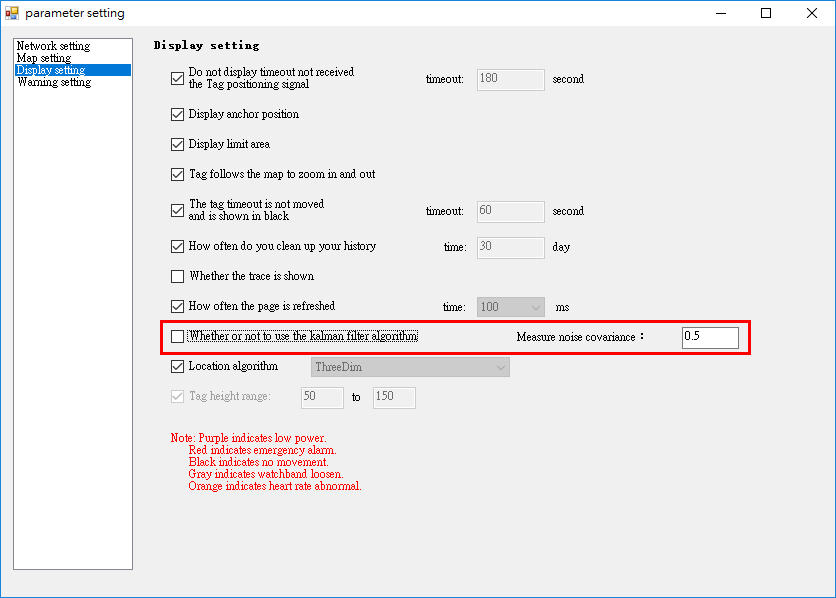
1. User can use Kalman filter to stabilize Tag position. The default value is 0.5, which is the default tag sleep time of 1 second, and the program will adjust itself according to the sleep time by this value. The larger the value, the more stable the positioning display. However, if the value is too large, the positioning coordinates will be distorted to the point where normal positioning cannot be achieved.
2. If the offset is >1m, please check if there is any obstacle between the tag and anchor. Additionally, there is a definite relationship between UWB positioning accuracy and some other elements.
a. Actual length and width of the map
The more accurate value given, the more accurate the coordinate converts.
b. Referencing item’s location on map
The accuracy of the positioning depends on the actual location of item corresponding to the map.
c. The location of the anchor on map in relate to its actual location
Our software converts the coordinate into a grid view; hence the result of the coordinate will vary on the accuracy of value given.
Attention: The center point of the squarish block is the UWB antenna.
d. It is suggested to place Anchor on the same horizontal level
To avoid calculation error on angle estimation
e. Set the max. and min. height of the tag in settings to avoid error height calculation
Question 5:
Is there a limit on the number of tags? How many tags can be managed by an Anchor?
A:There is no limit to the number of tags, but the following situations need to be considered
1. There is no limit to the number of Anchor and positioning software. But Anchor is a single-chip device, so it can only process one positioning packet at a time. It takes about 5-7ms to process a positioning packet, so an Anchor can theoretically process 100 messages in one second
2. A large number of tags in a dense area will cause packet collision problems. In addition, too fast transmission frequency will make the collision problem more serious.
3. When performing three-point positioning, at least three Anchors are required for an area. And more Anchors can share the burden of transmission and the number of tags accommodated in a single time
4. A large number of tags will burden the system. Therefore, in a large number of cases, the performance of the computer running the positioning program will also affect the number of tags in a single area.
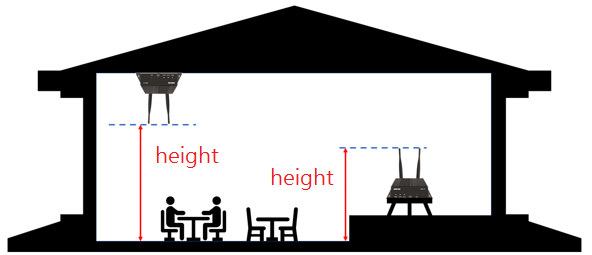
Cautions for Anchor Setting
1. Anchor height is the height from ground to the tip of the antenna head. The ground mentioned here refers to the common horizontal datum of all Anchor.
A. Enter the correct Anchor height
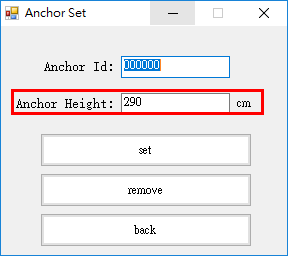
B. The picture below describes Anchor height
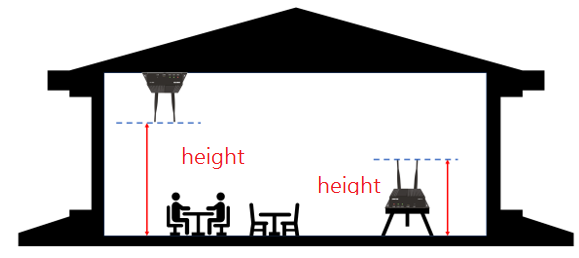
C. The picture below describes ground
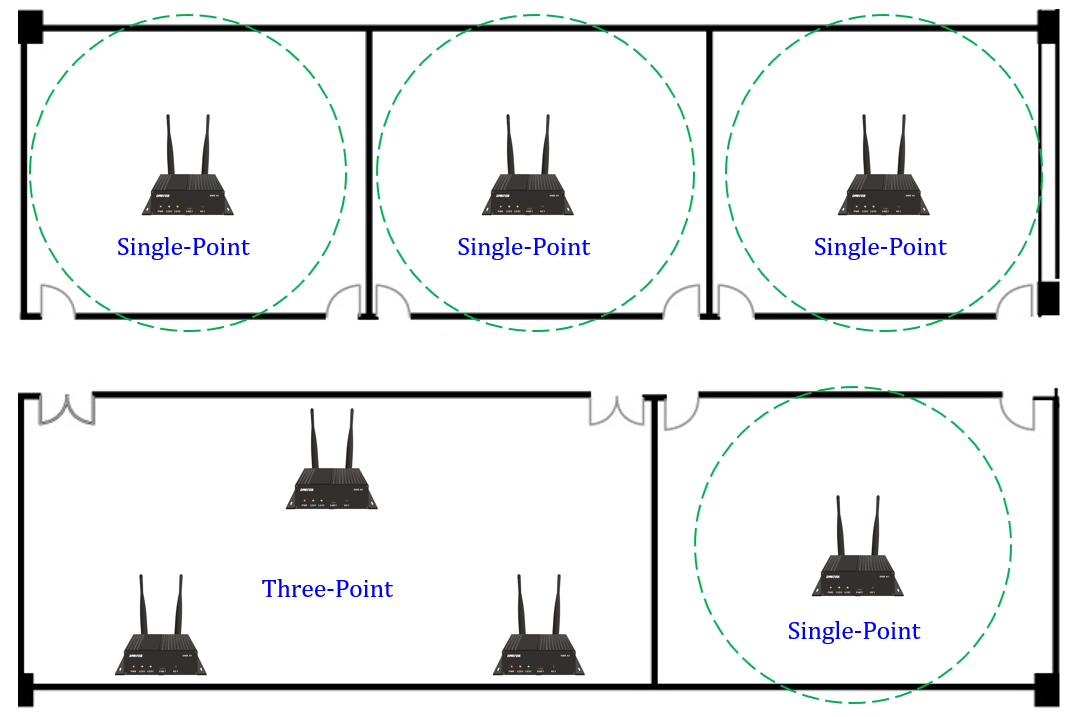
2. Keep there is no obstacle between Anchor and Tag, please adjust the position of Anchor according to the site conditions
A. It is not recommended for different rooms to share one Anchor
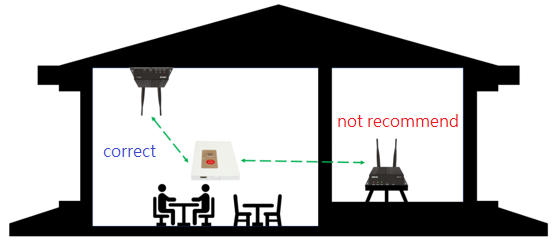
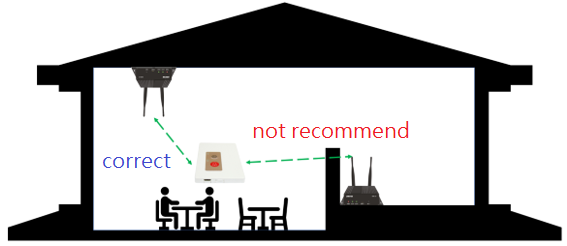
B. It is not recommended to place Anchor at area which there is large obstacle between anchor and tag
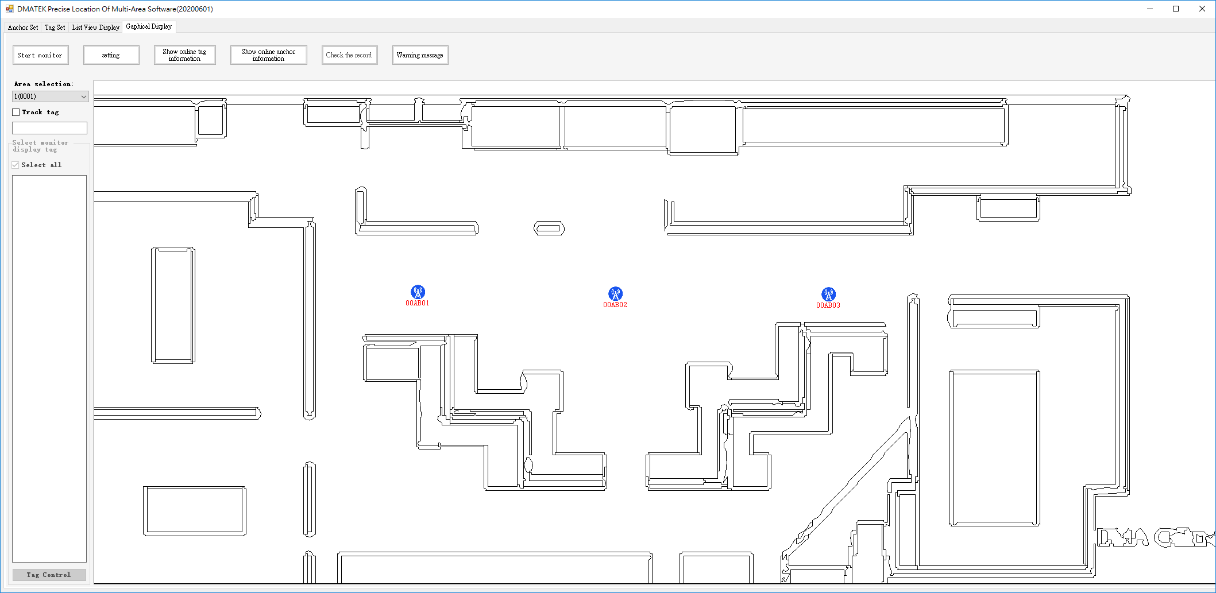
3. Please consider the location of Anchor according to the positioning area
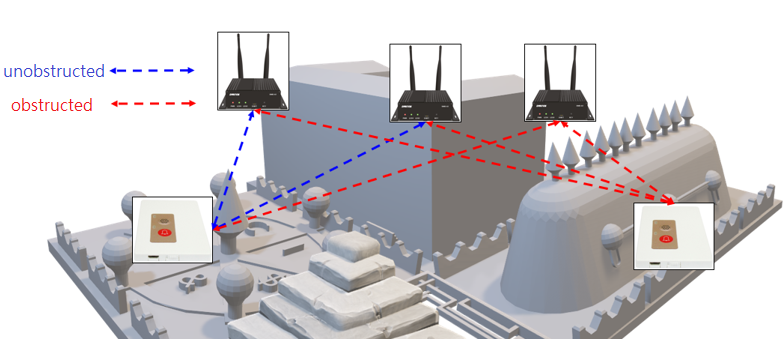
4. Please do not place neighboring anchor in a row
A. Circumstances depicted below is allowed
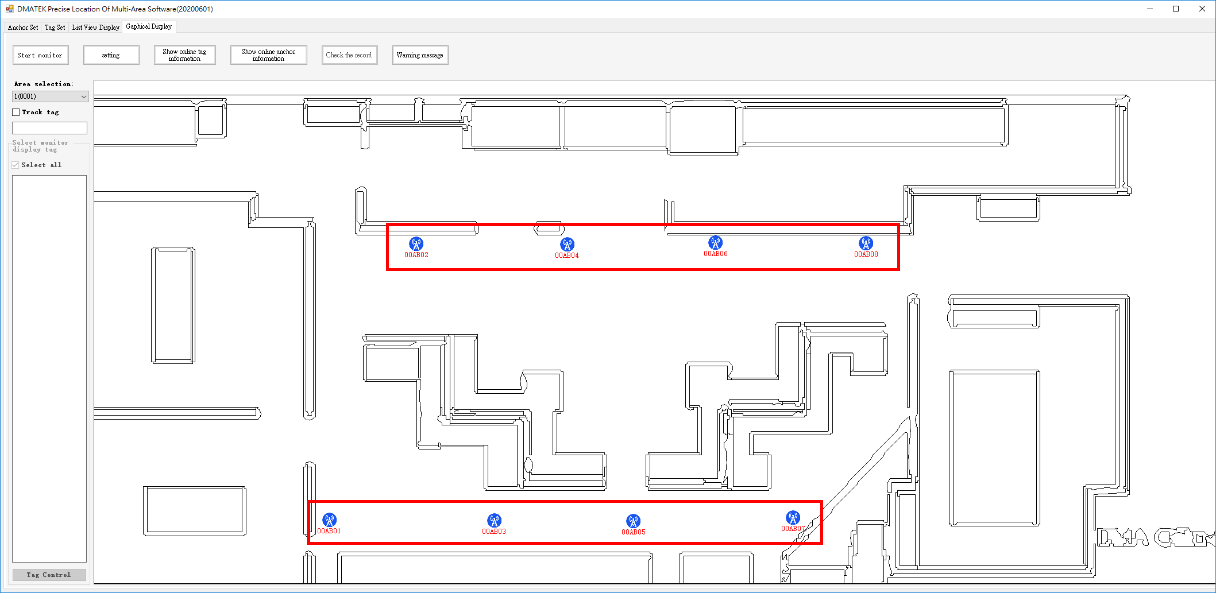
B. Please avoid circumstances depicted below
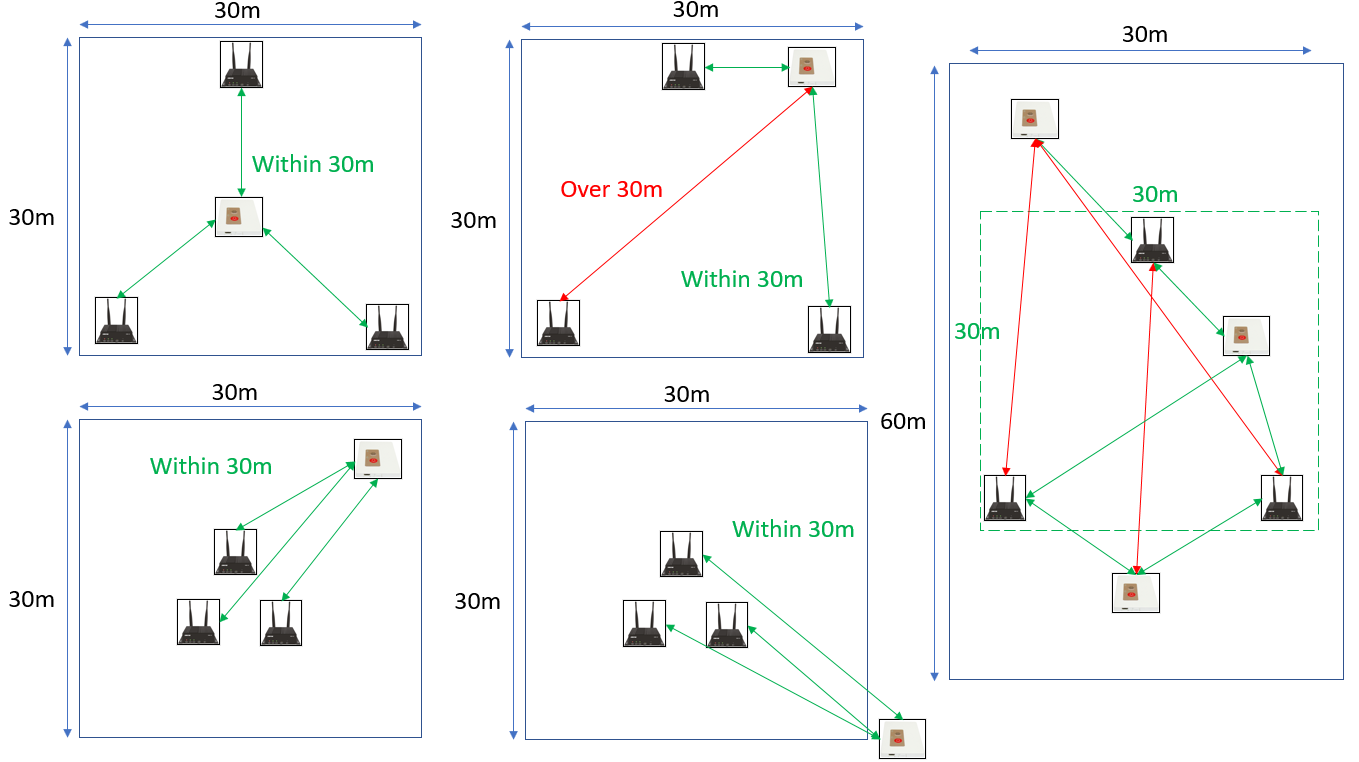
5. Scope of Anchor installation
The recommended installation area is 30m x 30m. There are three anchors, the main reason is
1). Our UWB equipment can ensure stable transmission in the unobstructed communication range of 30m-50m
2). The positioning error within the range of 30m x 30m can be guaranteed below 1m
3). Among them, there are three Anchors within 30m x 30m, which means as shown in the figure below
6. Please confirm parameter setting
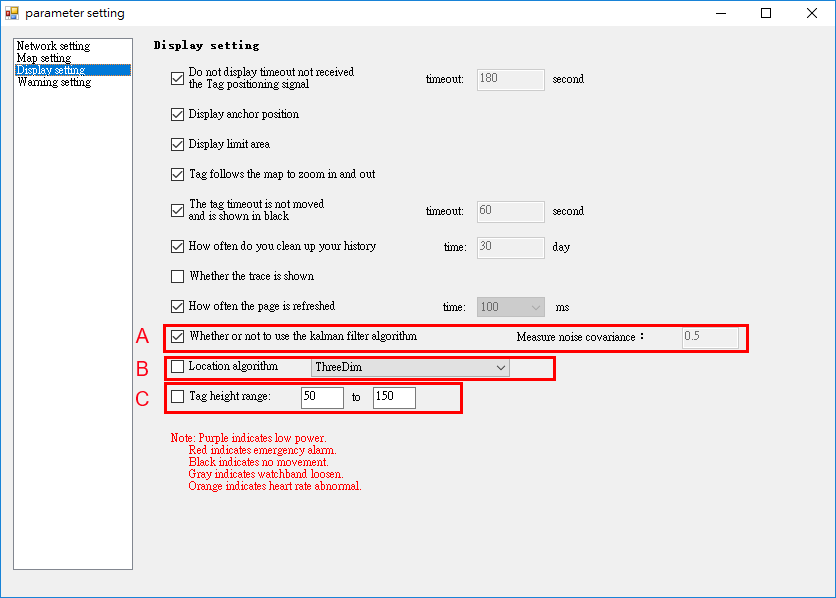
A. Whether or not to use Kalman filter, because signal often have small fluctuation, using filter will make position display more stable. The default value is 0.5, which is the default tag sleep time of 1 second, and the program will adjust itself according to the sleep time by this value. The larger the value, the more stable the positioning display. However, if the value is too large, the positioning coordinates will be distorted to the point where normal positioning cannot be achieved.
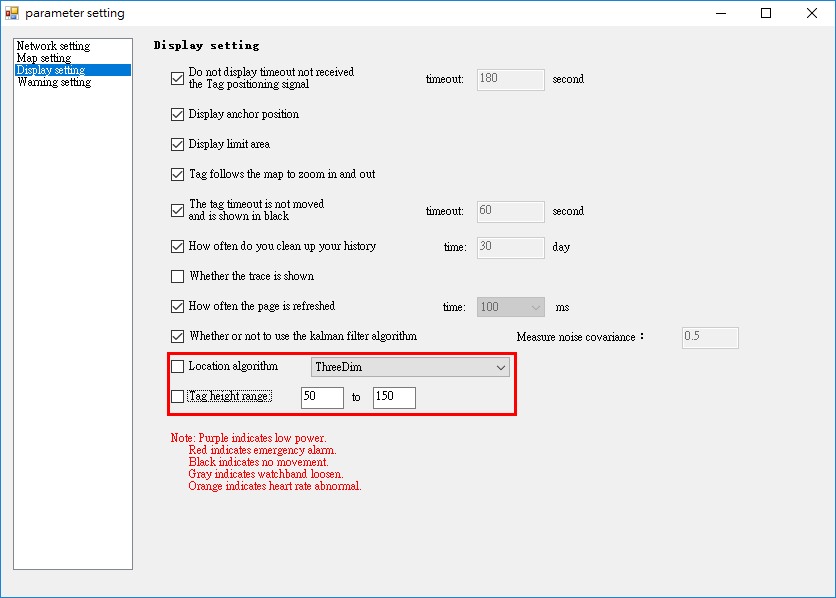
B. Use three base station location,algorithm selection
I. If not ticked, default to use two-dimensional positioning algorithm, does not require to set Tag height, if “Set height range” under C option is ticked, it helps enhance positioning accuracy
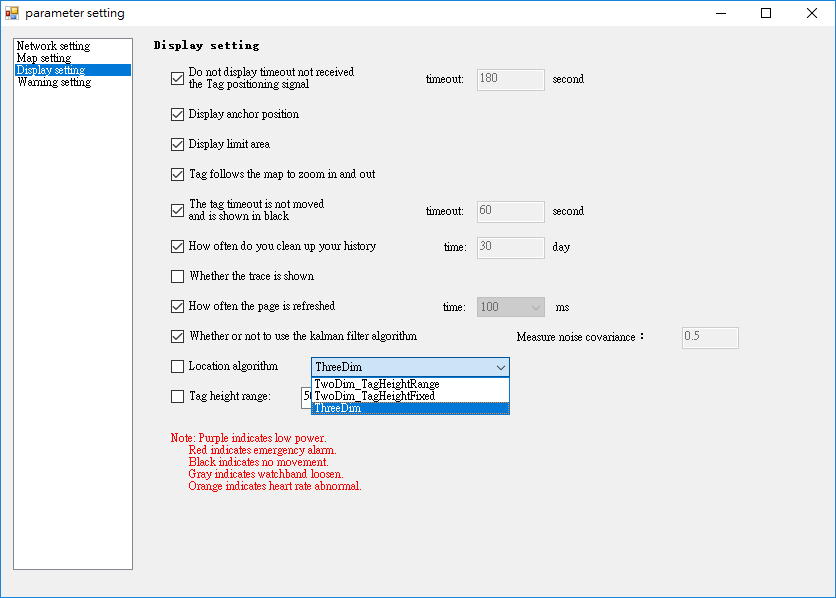
II. If ticked, there are 3 options available:
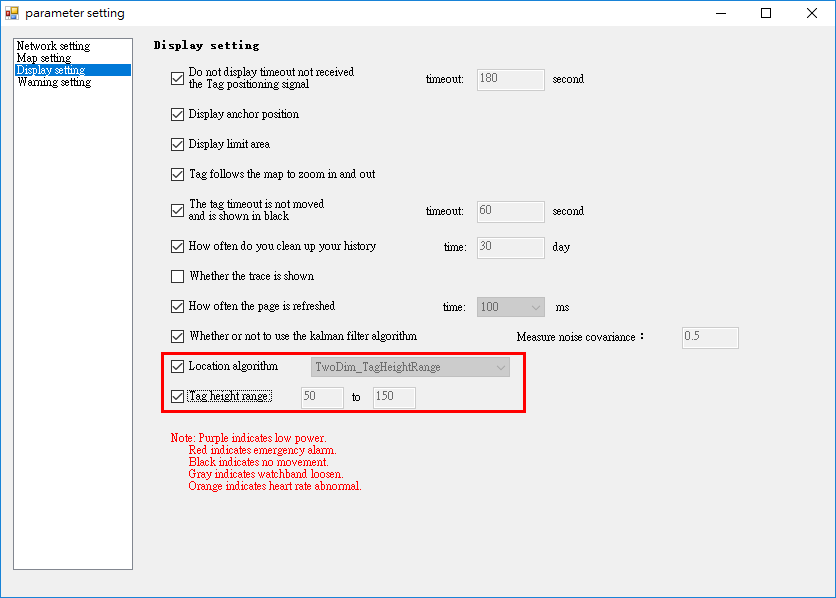
TwoDim_TagHeightRange: Two-dimensional positioning algorithm, can obtain x and y coordinate of the tag, no need to set a fixed height for Tag, but recommended to set a height range to enhance accuracy. This method is more used in circumstances which Tag height might change, for example when people wears Tag
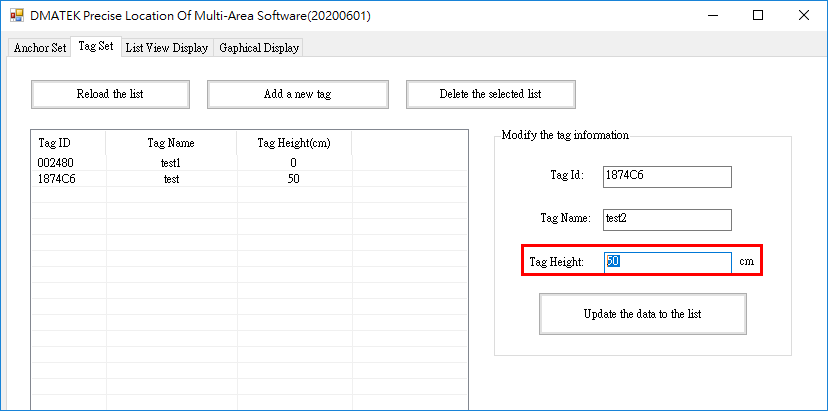
TwoDim_TagHeightFixed: This algorithm obtain x, y, z Tag coordinate, Tag need to set fixed height. This algorithm is commonly used in event that Tag height remains unchanged. For example, truck positioning.
ThreeDim: 3D algorithm, can obtain x, y, z Tag coordinate, but Tag and Anchor need to have high sensitivity sensor to use this algorithm method, or else software will adopt the TwoDim_TagHeightRange automatically. This algorithm is used in circumstances that requires Tag height.
C. Tag height range can helps enhace positioning accuracy and improve division by zero errior of 3D positioning algorithm. If the calculation is divided by zero, the display point will be abnormally bouncing in a certain area. This parameter is only used when TwoDim_TagHeightRange is used
Setting in Tag set page if using TwoDim_TagHeightFixed
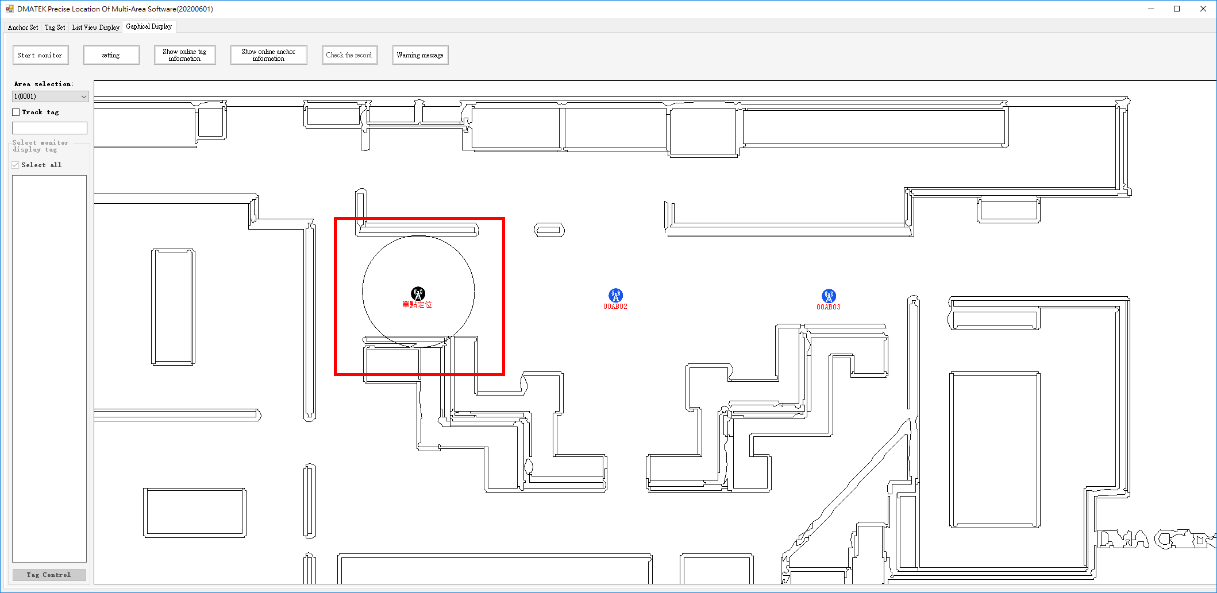
D. Setting at Anchor Set page if using single point Anchor, select Single point to allow single point positioning. It is required to set detecting range under Single point range
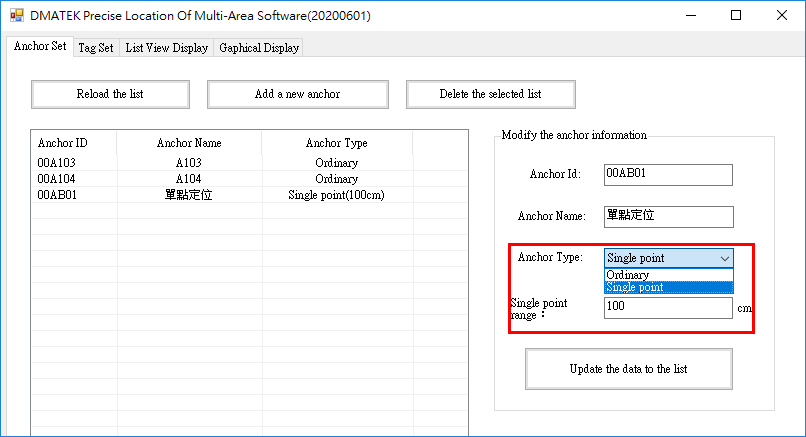
After that you should see the detection range of a single point positioning. However, the single point positioning range here represent the tag is within the detection range. If the tag is outside the detection range it will be used for trilateration.
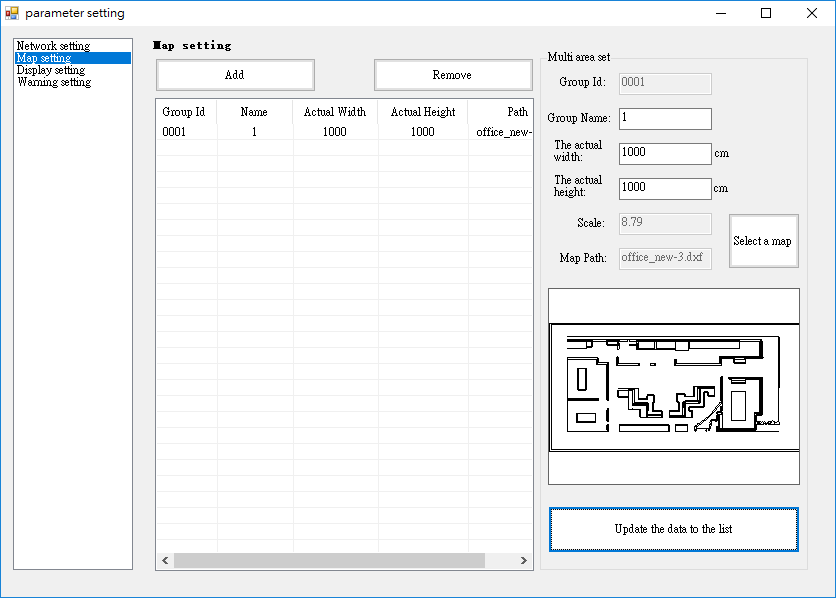
7. Map size, please check those white borders
For example:Two same map with and without white border removed
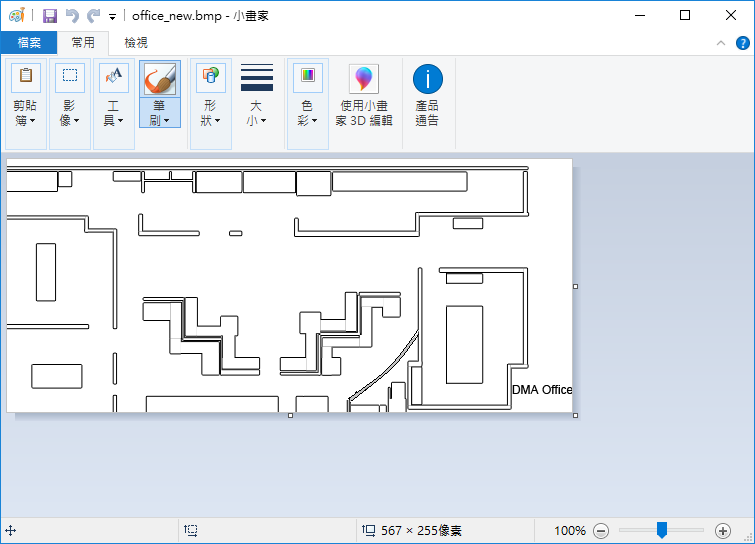
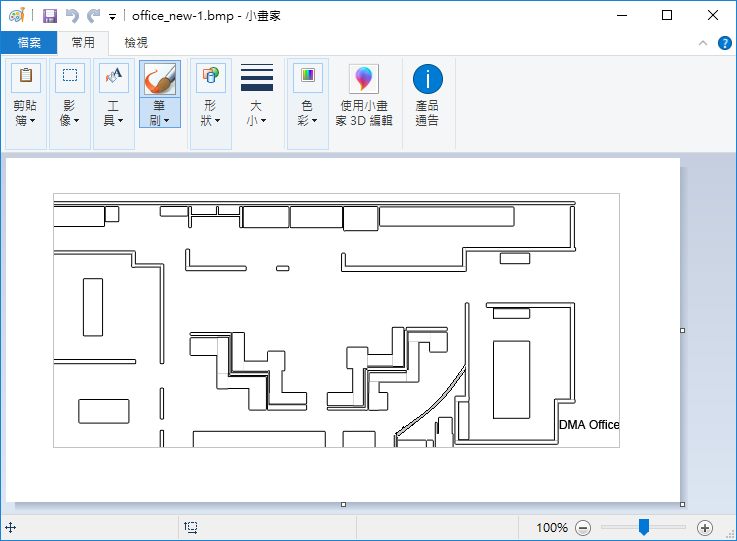
White border will be difficult to distinguish as the color of the frame is also white
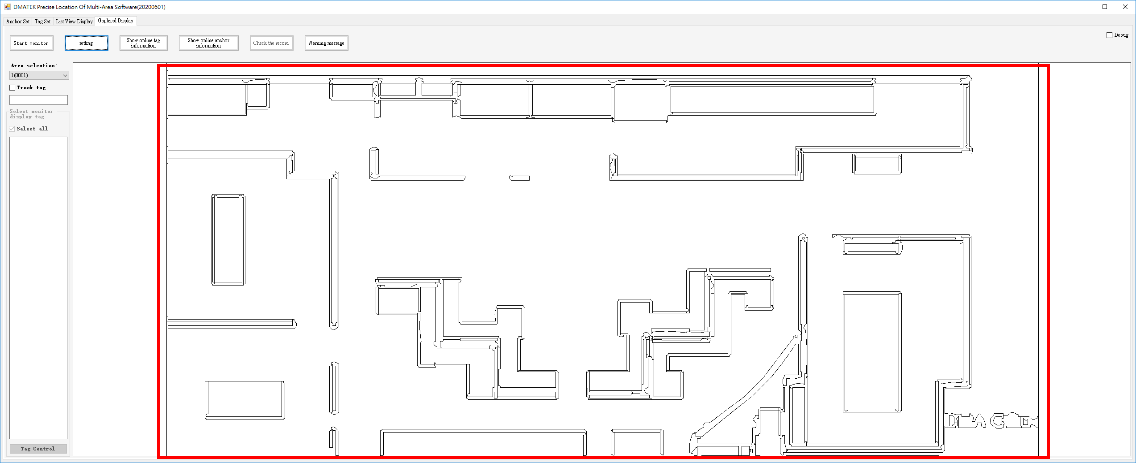
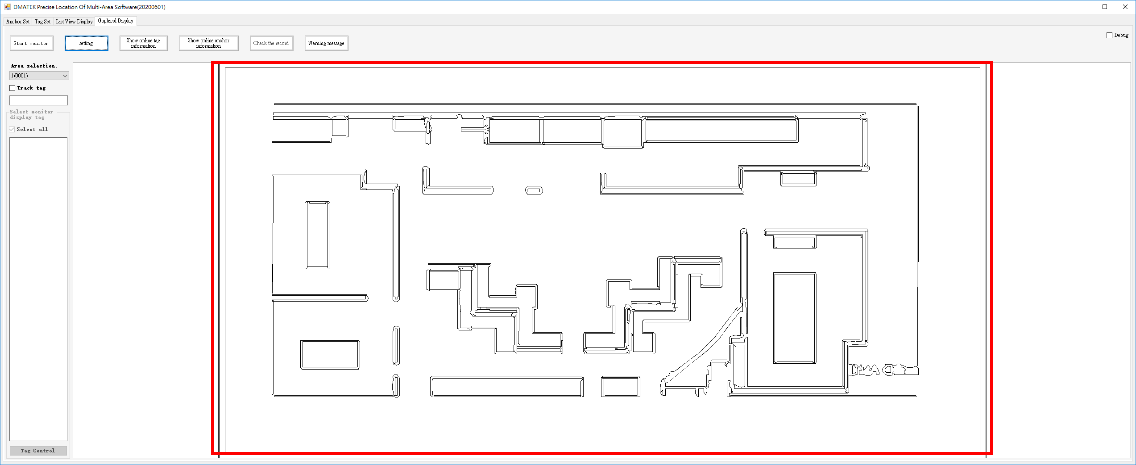
Include the white border while setting length and width distance
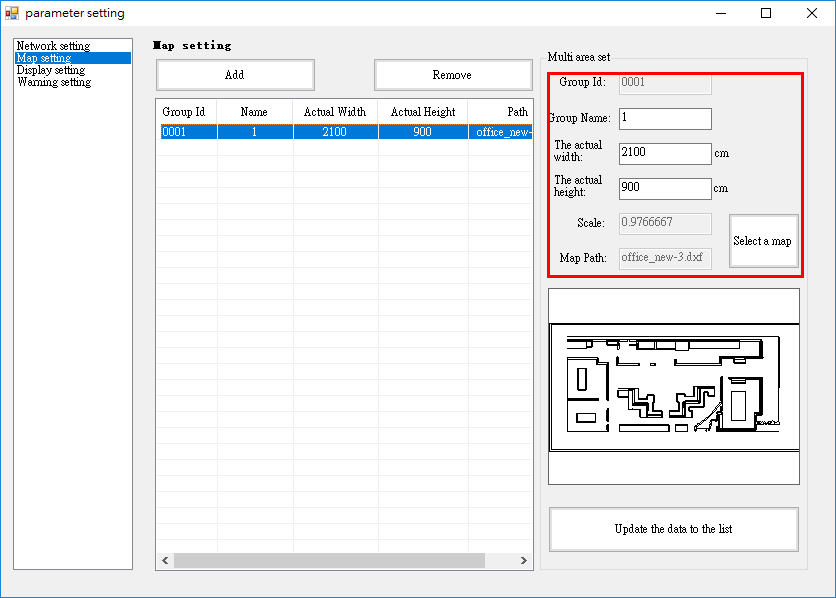
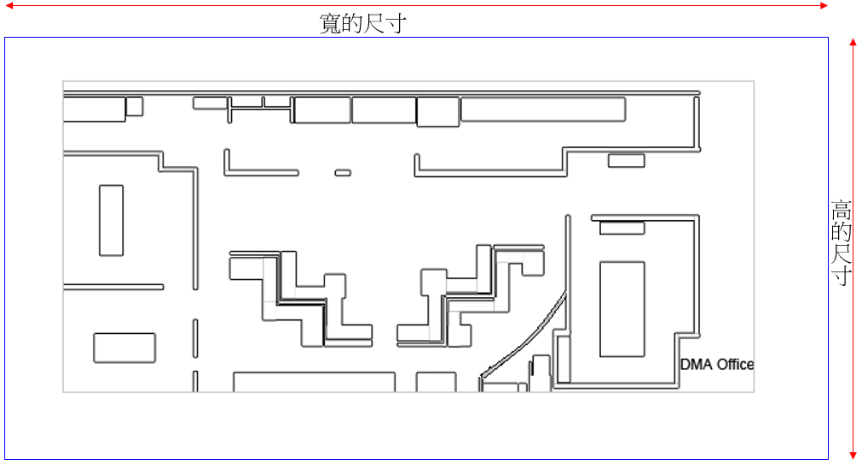
8. Confirm size and ratio of picture, or else problems such as unable to select map or inaccurate positioning may arise