


車身電子通訊網路模擬模組 |CAN BUS-F500
周邊介面模組
Model:CAN BUS-F500
| 產品特性 |
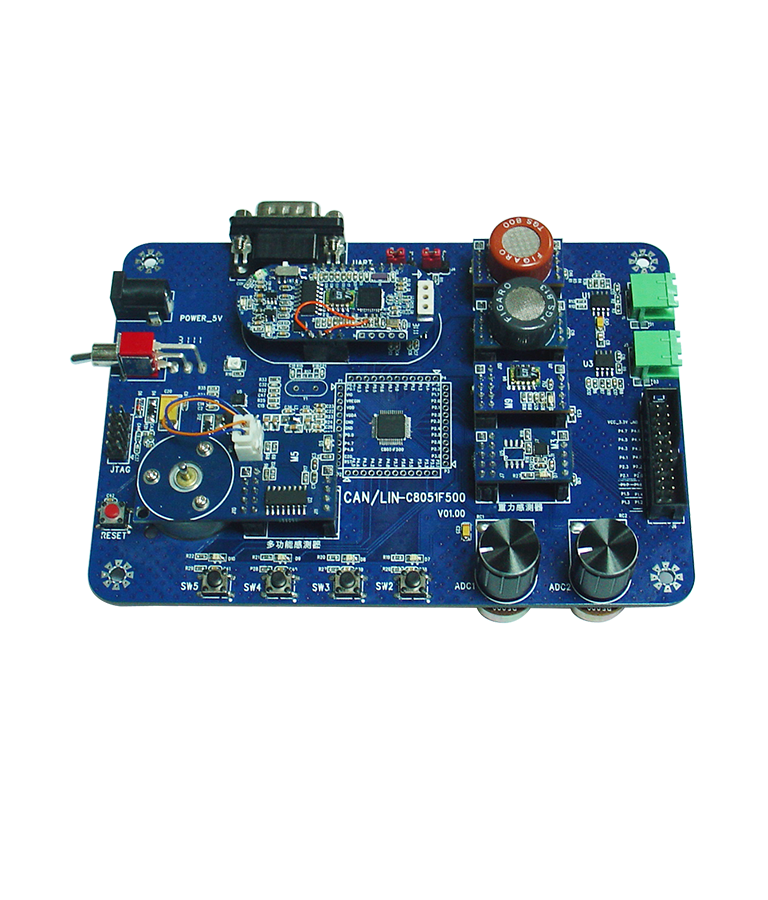
圖一 不含感測器模組的車身電子網路模擬板
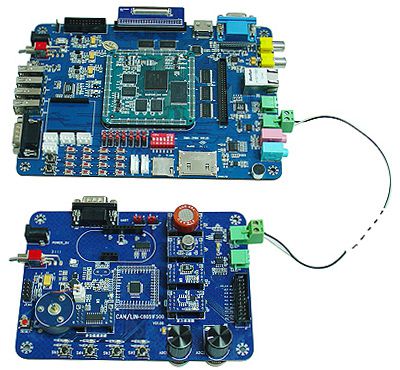
圖二 CAN BUS-F500與DMA-210U平台連接圖

圖三 CAN BUS-F500與DMA-210XP平台連接圖
CAN BUS-F500 車身電子通訊網路模擬模組除了本身的各項強大功能並能借由CAN 2.0B 的介面與ARM Google Android 嵌入式系統整合,將其節點的各項功能配合嵌入式系統整合,除了學習CAN/LIN 的通訊及結合各種感測器節點訊息的監控與收集,並能讓其CAN BUS 底層結合嵌入式,達到與嵌入式合而為一的各項軟、硬體整合應用。
| 配合實驗 |
以下實驗須配合車載平實現:
實驗 1 CAN/LIN 車身電子通訊模組的軟硬體開發工具介紹
實驗 2 串列埠測試程式實驗
實驗 3 兩個ADC 測試程式
實驗 4 CAN 匯流排協定實驗介紹
實驗 5 LIN 匯流排協定實驗介紹
實驗 6 CAN 測試程式,CAN 的數據發送與接收
實驗 7 LIN 測試程式
實驗 8 按鍵和LED測試程式
實驗 9 CAN 酒精感測器節點程式設計
實驗10 CAN 空氣品質感測器節點程式設計
實驗11 CAN 溫濕度感測器節點程式設計
實驗12 CAN 重力感測器節點程式設計
實驗13 CAN 多種感測器節點程式設計(酒精、空氣品質、溫濕度、GSensor),模擬車內環境的感測器同時應用
實驗14 CAN 直流電機節點程式設計
實驗15 各種感測器的底層設計應用在ARM Android 系統的驅動實驗
實驗16 如何將感測訊息借由CAN BUS與嵌入式系統結合並在嵌入式的 AP 顯示
實驗17 如何由CAN BUS 與Android 系統的ARM Cortex A8 DMA-210XP 平台的整合實驗
配合實驗教材
 |
 |
|
行動裝置嵌入式系統與軟體
(Cortex A8 S5PV210-Android 2.3.4開發應用實務) |
車載電子通訊系統設計實務
|
硬體規格與功能
- 中央處理器
CPU:Silicon C8051F500,主頻為 50MHz,核心為 High-speed 8051μC Code - 記憶體
* Flash 記憶體:64KB Flash;存在於可規劃的系統中;具保密功能
* Data RAM:4352 bytes Data RAM(256+4KB) - 串列埠 : 1 個 DB9 串列埠介面
- CAN 2.0B : 32 message objects
- LIN 2.1 : Master or slave operation using dedicated hardware
- JTAG 介面 : 1 個10PIN JTAG 介面位於底板上,可支援核心板模擬除錯及燒寫
- ZigBee 模組介面(選配)
可外接 ZigBee 2530 RF 無線通訊模組達到無線傳輸的功能,與DB9 串列介面複用 - 其他功能介面
* 4 個可控制的LED
* 2 個AD 輸入的可調電阻
* 4 個外部中斷按鍵 - 感測器介面
* 1 個酒精感測器介面,可外接酒精感測器模組
* 1 個空氣品質感測器介面,可外接空氣品質感測器模組
* 1 個溫濕度感測器介面,可外接溫濕度感測器模組
* 1 個GSensor 重力加速度感測器介面,可外接GSesnsor 感測器模組
* 1 個多功能感測器介面,可外接直流電機或是其他感測器模組 - 多功能擴充介面
可擴充 18 路GPIO 介面及所有的PIN 腳都有外接可量測與擴充 - 電源介面
採用5V,2A 外置電源供電 - 尺寸大小
PCB大小:149mm×105mm
CAN/LIN C8051F500 處理器主要特點
- 8051 核心,汽車級的微控制器,最高頻率為50MHz
- 12-Bit 200K ADC,5V 輸入電壓,最高可至32個輸入信號
- 9-11 Bit PWM
- 1 個CAN 2.0B
- 1 個LIN 2.1
- 1 個UART
- 1 個SPI
- 1 個IIC
- 6 路PCA/WDT
- 1 個SFR BUS
- 工作溫度:-40~+125℃
- 工作電壓:1.8~5.25V
基本配件












選購配件

