一、定位比較
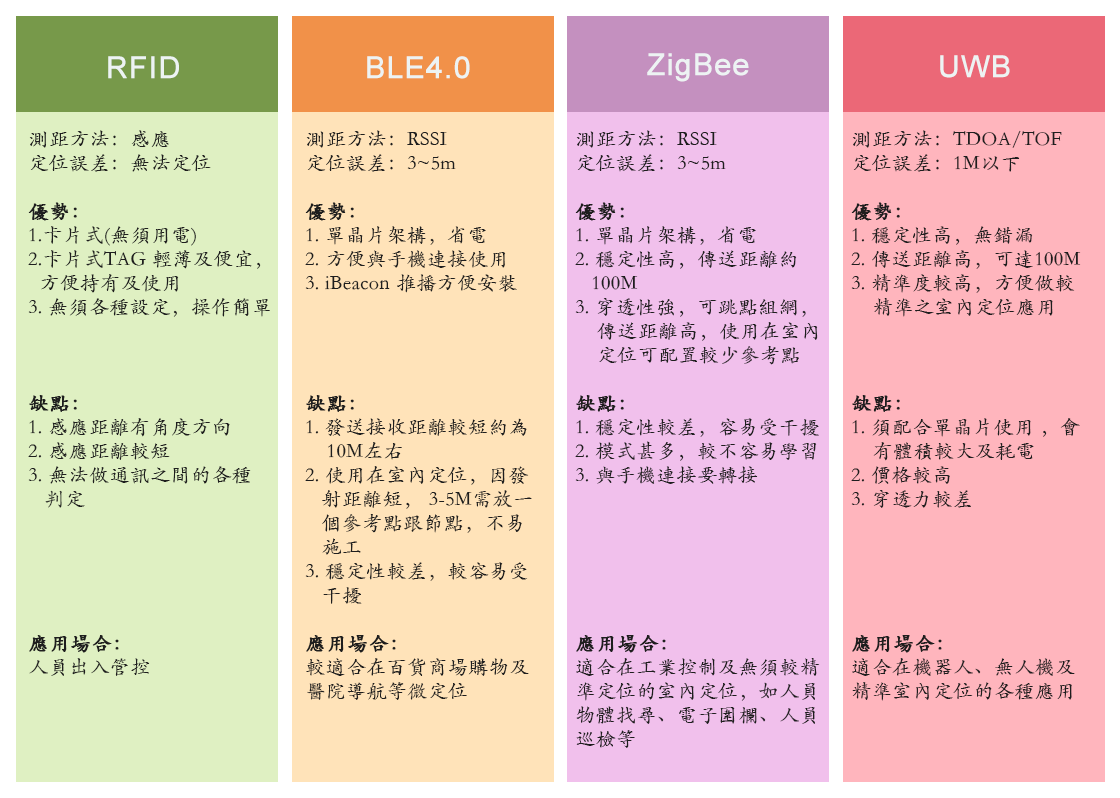
室內定位技術及優缺點比較
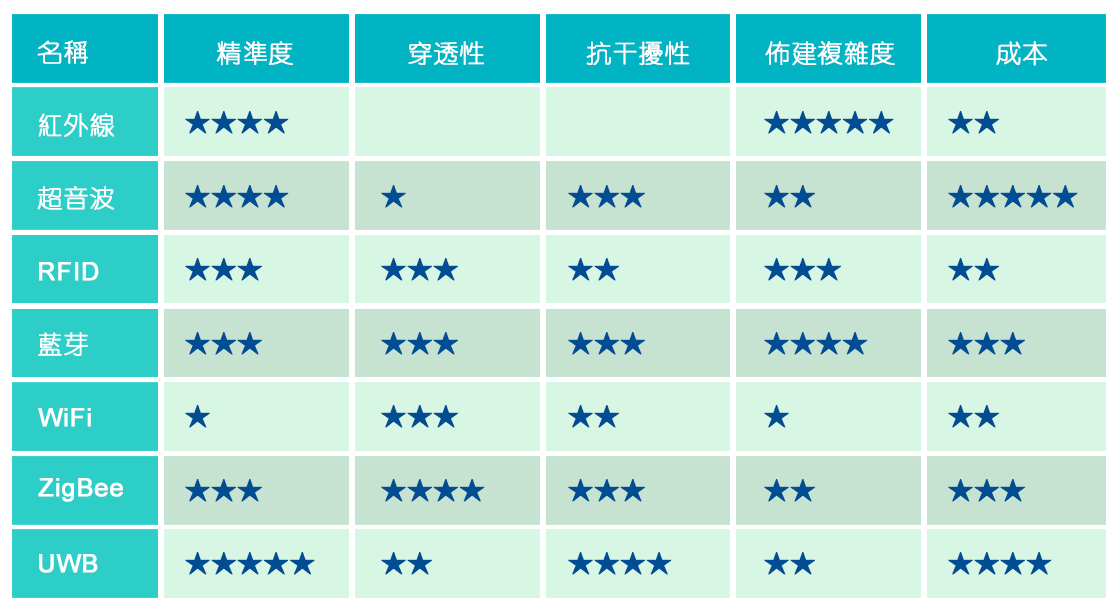
定內定位技術精準度等比較
RFID:感應量測。讀寫器有限制一次讀取TAG的數量。
藍芽BT:RSSI量測。易受金屬與環境干擾,節點有限制連接TAG的數量。
ZigBee:RSSI量測。易受金屬與環境干擾,節點無限制連接TAG的數量。
UWB:TDOF/TOF演算法(頻段為3.25G~6.75G)。不易受環境通訊頻段影響,基站無限制連接TAG的數量。
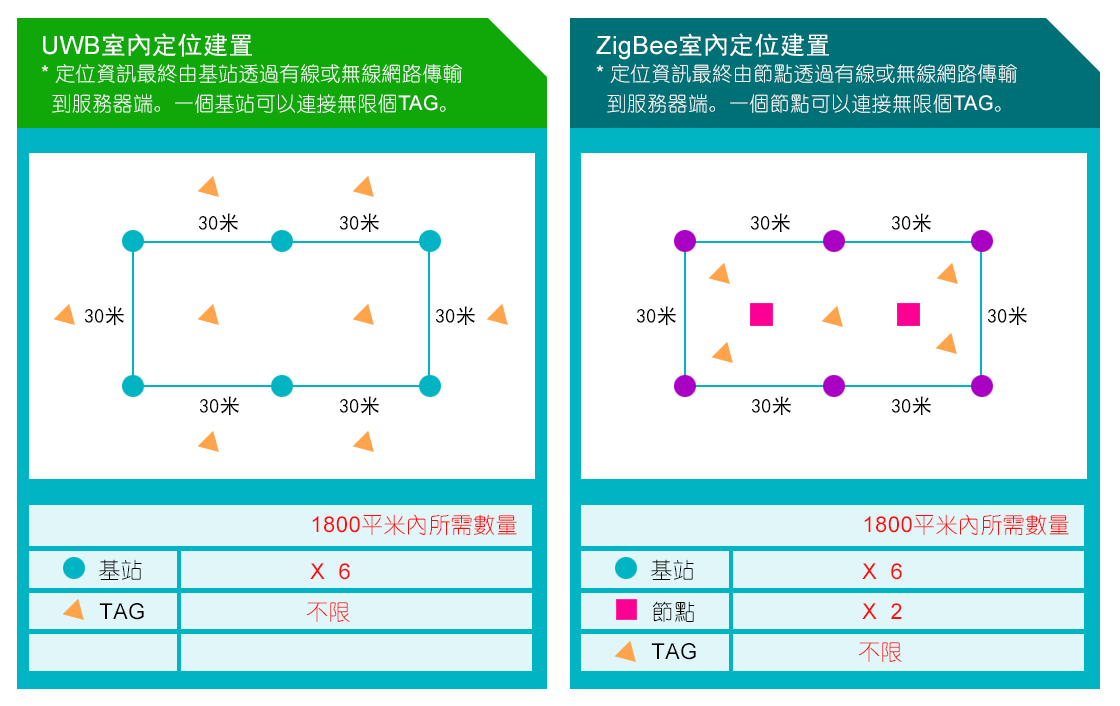
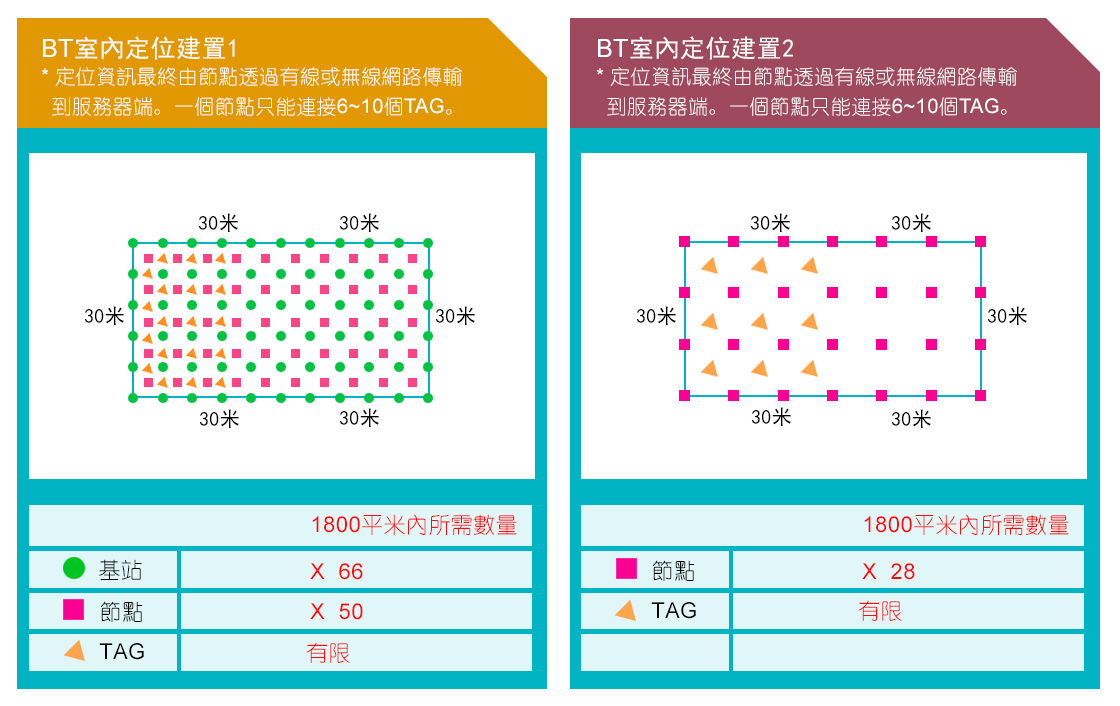
室內定位技術建置比較
UWB定位測距有以下幾種方式,我司採用的是最簡單快速的TOF定位方法:
TOF定位演算法
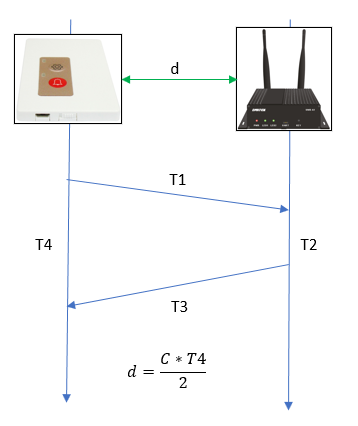
基於TOF的定位方法與基於TOA的定位方法在本質上是相同的,而TOF測距不依賴基站與Tag的時間同步,故沒有時脈同步偏差帶來的誤差,但TOF測距方法的時間取決於時脈精度,時脈偏移會帶來誤差。為了減少時脈偏移量造成的測距誤差,通常採用正反兩個方向的測量方法,即遠端基站發送測距資訊,Tag接收測距資訊並回復,然後再由Tag發起測距資訊,遠端基站回復,通過求取飛行時間平均值,減少兩者之間的時間偏移,從而提高測距精度。
註:我司只使用Tag發起測距封包,周圍基站回覆的時間測距方式
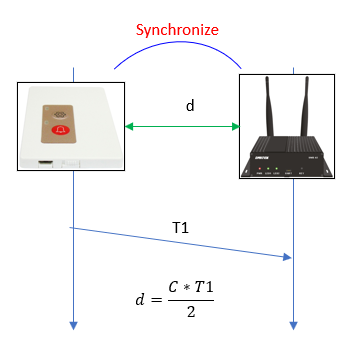
TOA定位演算法
TOA技術使用某個基站的絕對到達時間(不過可能會有偏差的),而不是從一個基站到達另一個基站之間測得的時間差,因此需要進行時間同步。跟TOF一樣以假定的電磁波傳播速度,從封包到達基站的時間戳直接計算距離。優點是可以減少反覆傳播封包造成的時間誤差,相對在時間校調與環境設定調校上會比TOF測距更加複雜減少反覆傳播封包造成的時間誤差,相對在時間校調與環境設定調校上會比TOF測距更加複雜。
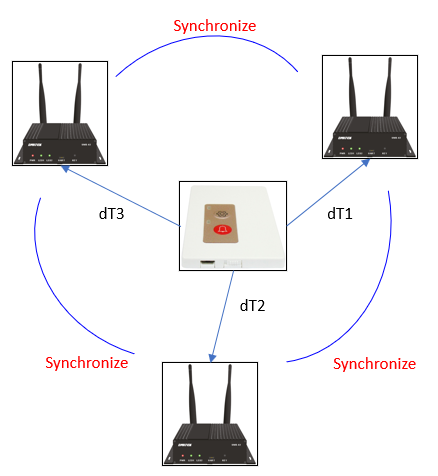
TDOA定位演算法
基於TDOA的定位方法又稱為雙曲線定位,通常運用導航和監視技術如GPS,其原理是通過測量UWB信號從UWB Tag到本身與其他兩個UWB基站之間傳播時間的差值,得到UWB Tag到兩個UWB基站之間的固定距離差。TDOA演算法是對TOA演算法的改進,它並不是直接利用信號到達時間,而是利用多個UWB基站接收到信號的時間差來確定移動目標的位置。因此與TOA相比並不需要加入專門的時間戳記來與Tag進行時脈同步,定位精度相對有所提高,但是在位置計算上就不像TOF與TOA這麼直觀。
註:二維計算需要至少三個基站,三維計算至少需要四個基站
以下是其他定位技術比較會用到的方法,如Zigbee定位或是藍芽定位,因為其他訊號特性不像UWB訊號可以準確計算出距離資訊。其中技術諸如紅外線、超音波、RFID等不具備二維以上定位座標計算性質,因此不在說明範疇。
AOA(Angle of Arrival)
AOA是利用多天線的相位角度計算來推算位置,接收端配置「指向式天線」或「天線陣列」,透過不同的天線接收同一個發射端傳出的訊號所造成的訊號差異,而計算出「發射端」相對於「接收端」的角度,再定義出接收端的平面高度,交匯計算出發射端的座標。
一般來說,只要天線陣列配置得宜,掃描頻率夠高,即可精準定位,且不受室內裝潢擺設的影響。缺點則是發射端與接收端的距離越遠,誤差值越大,且接收端由於配置天線陣列,所以設備成本較高,此外,AOA技術難度頗高。除了UWB定位外,常見用於藍芽定位使用。
RSSI(Received Signal Strength Indicator)
「接收端」收到來自不同「基地台」的訊號,因為傳輸距離的不同,會造成不同程度的訊號衰減。透過所接收到的訊號衰減程度,可計算出接收端與個別基地台的距離,再套上「三角定位公式」,就能計算出接收端所在的座標。
比方說,若已知1公尺距離的RSSI數值,那麼大於該值就意味著距離小於1公尺,小於該值則意味著距離大於1公尺。透過佈署多個基地台,就可以透過與兩個或多個基地台的相對距離(三角定位),來找到用戶位置的大致區域。
然而當室內有任何會造成訊號衰減的因素時,計算就會失準,例如複雜的裝潢、穿梭的人潮等,而且訊號強度並非線性表現,因此RSSI的實用性有限,定位精準度亦難以提升,定位偏差大約會落在3-5公尺,即便有優良的演算法也無法提升太多,因此大多會用在區域型定位上。
以Zigbee為例,RSSI與距離的關係如下:
RSSI = -(10*n*log10(d) + A)
● RSSI 是接收到Zigbee訊號的RSSI數值(dBm)
● n 是信號耗損參數
● d 是標籤與節點的距離
● A 是標準距離的RSSI數值
下表為Zigbee規格書提供的信號耗損參考參數
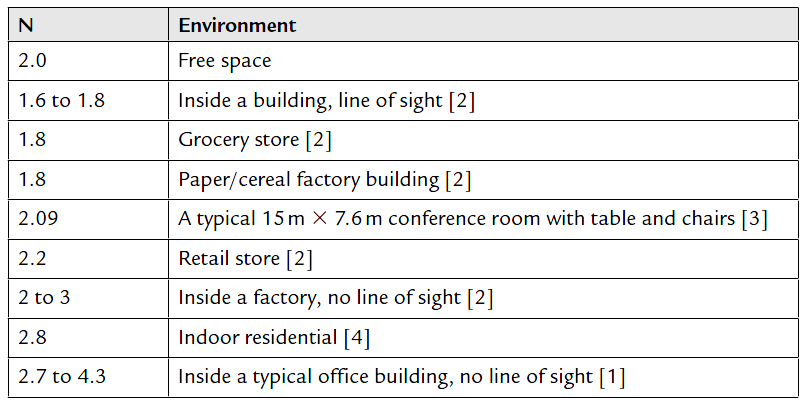
註:我司Zigbee定位系統主要以區域定位為主,三點定位是利用RSSI的數值比例來推算位置,而不是由RSSI反計算出距離後再計算座標