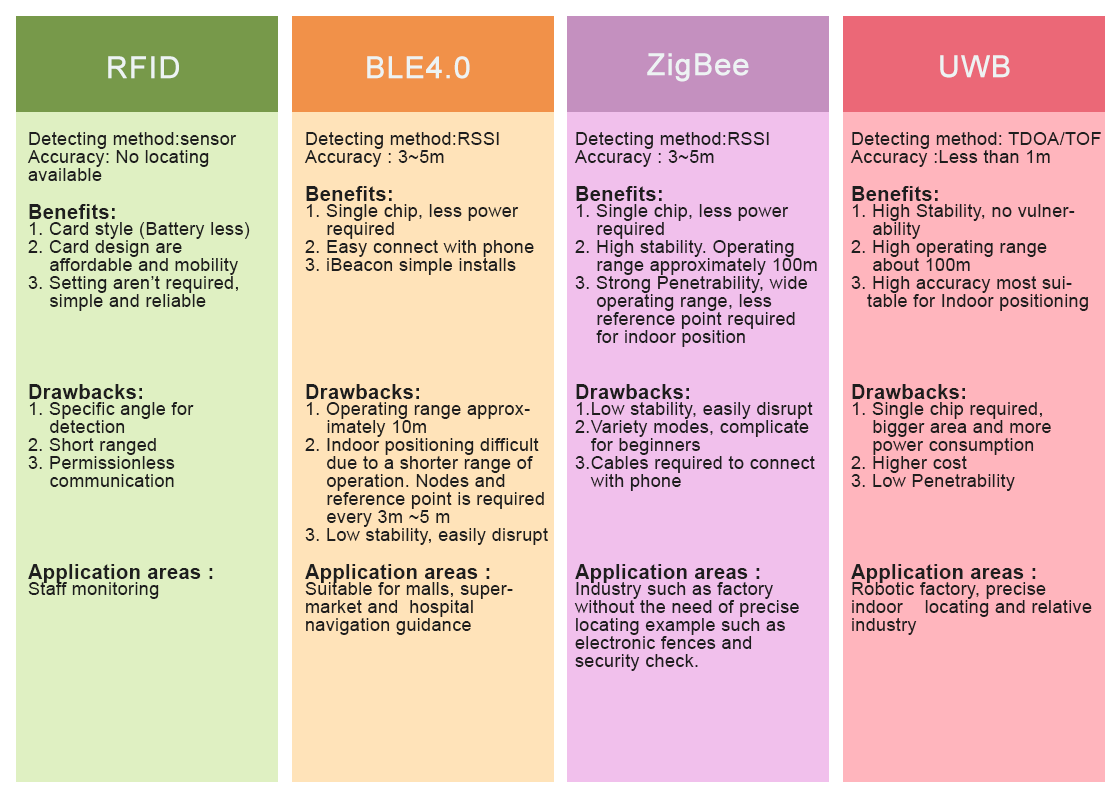
Comparison of advantages and disadvantages about IPS
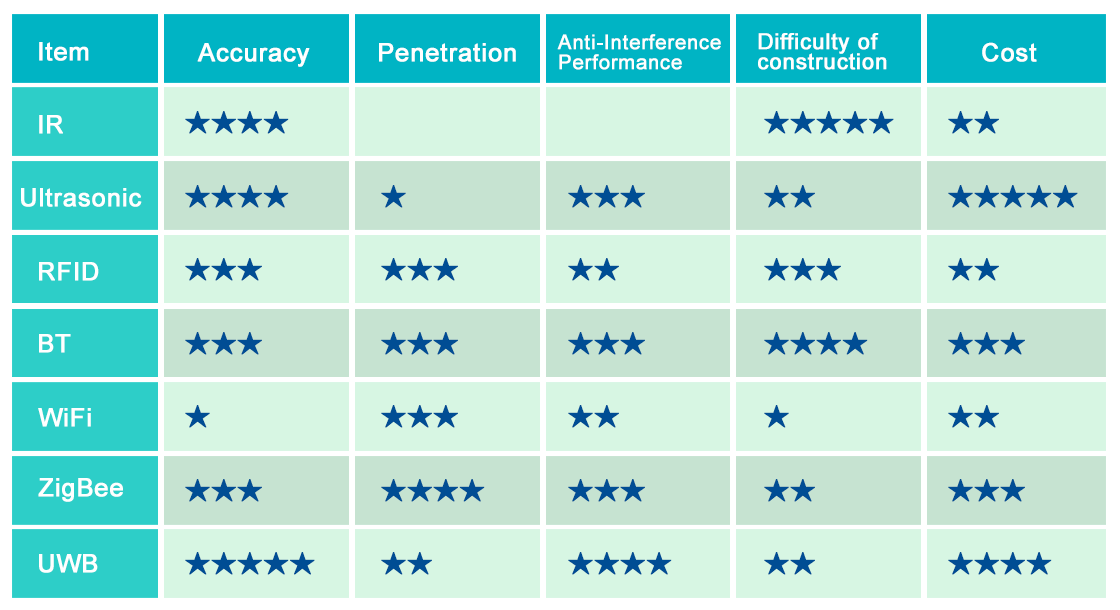
Comparison of accuracy about IPS
RFID: Induction measurement. RFID reader has limit on the amount of TAG to be read at the same time.
BT / ZigBee: RSSI measurement (high tendency to be interfered by metal and environment), no limit on the number of TAGs connected to the node point.
UWB: TDOA/TOF algorithm (frequency band is 3.25G~6.75G, not easily influenced by the environment frequency band), no limit on the connected TAG to the base station
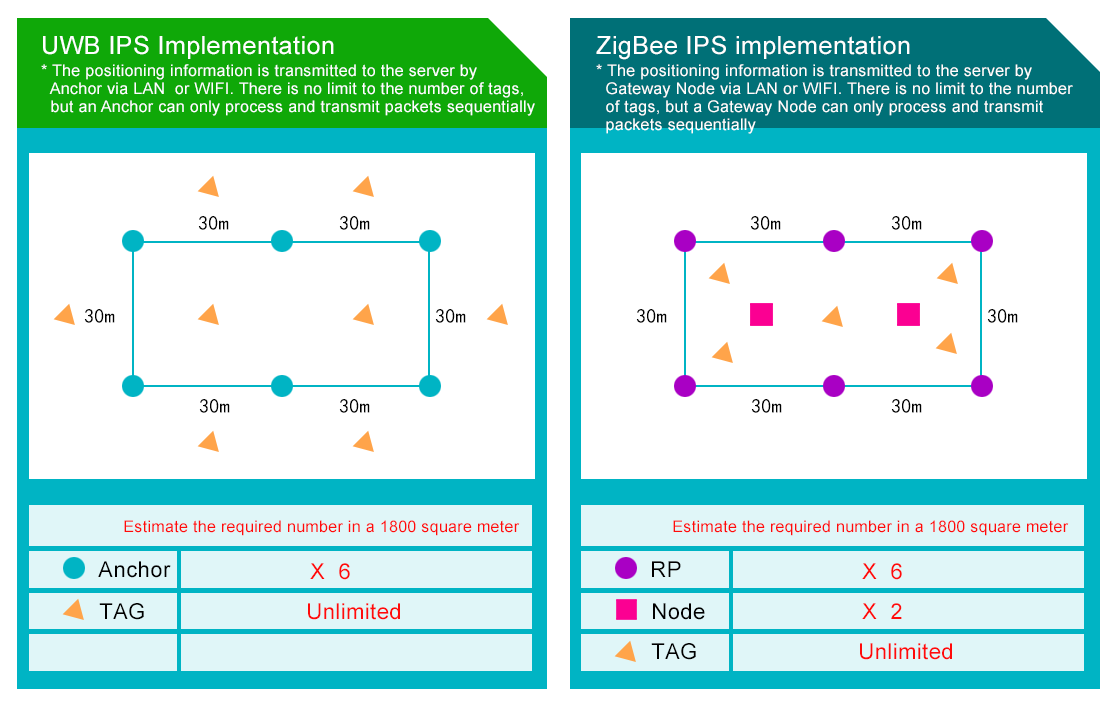
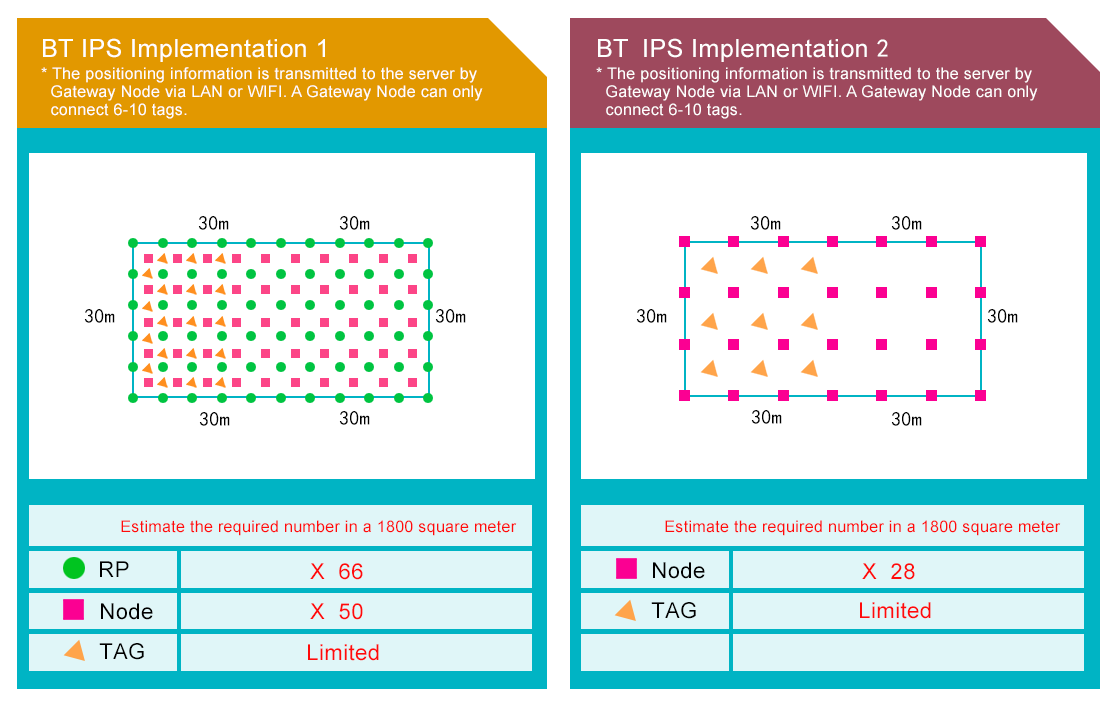
Comparison of structure about IPS
UWB positioning has the following ranging methods, the TOF positioning method adopted by our company is the simplest and fastest
TOF Ranging Algorithm ( Time of flight )
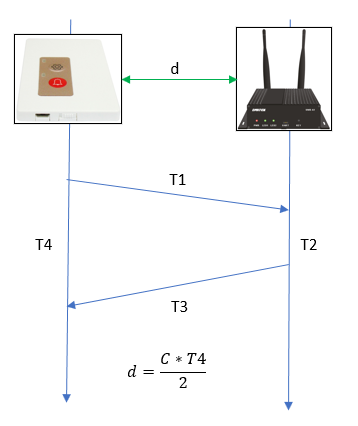
The TOF-based positioning method is essentially the same as the TOA-based positioning method. The TOF ranging does not rely on the time synchronization between Anchor and Tag, so there is no error caused by clock synchronization deviation.
However, the time data in the TOF ranging method depends on the clock accuracy, and the clock offset will cause errors. In order to reduce the ranging error caused by the clock offset, the measurement method in both positive and negative directions is usually adopted, that is, the Anchor sends the ranging packet, and the Tag receives the ranging packet and responds. Then Tag sends a ranging packet, and Anchor replies.
In this way, we can reduce the time offset between the two devices by calculating the average flight time, thereby improving the ranging accuracy.
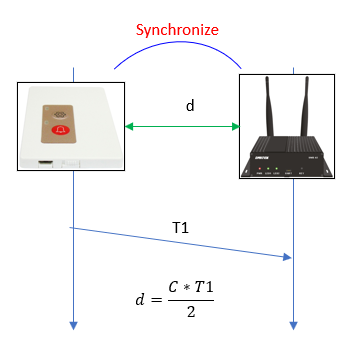
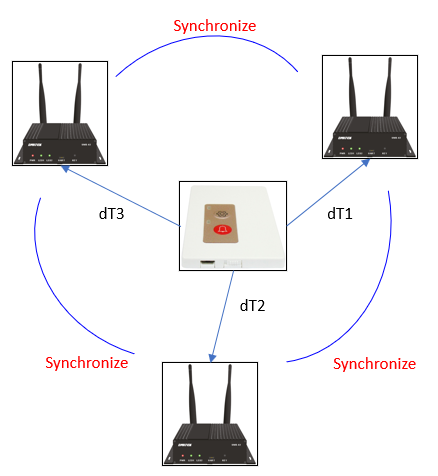
Note: Our products only use Tag to send ranging packets, and measure the response time of surrounding Anchor to obtain the distance method
TOA Positioning Algorithm ( Time of Arrival )
TOA technology uses the absolute arrival time of a certain Anchor (but it may be biased), rather than the measured time difference between one anchor and another Anchor. Therefore, each Anchor needs time synchronization. As with TOF, the distance is calculated directly from the time stamp when the packet reaches the Anchor at the assumed electromagnetic wave propagation speed.
The advantage of this method is that it can reduce the time error caused by repeated propagation of packets, but it is more complicated than TOF ranging in time adjustment and environmental setting adjustment.
TDOA Positioning Algorithm ( Time Difference of Arrival )
The positioning method based on TDOA is also called hyperbolic positioning. It usually uses navigation and surveillance technologies such as GPS. Its principle is to measure the difference in the propagation time of the UWB signal from the tag to itself and the other two Anchors to obtain the tag to two The fixed distance difference between anchors.
The TDOA algorithm is an improvement of the TOA algorithm. However, it does not directly use the signal arrival time, but uses the time difference between the signals received by multiple Anhcor to determine the location of the moving target.
Therefore, compared with TOA, there is no need to add a special time stamp to synchronize the clock with the Tag, and the positioning accuracy is relatively improved. But the position calculation is not as intuitive as TOF and TOA.
Note: Two-dimensional coordinate calculation requires at least three Anchors, and three-dimensional coordinate calculation requires at least four Anchors
The following are the methods commonly used in other positioning technologies, such as Zigbee positioning or Bluetooth positioning. Because other signal characteristics are not like UWB signals, which can accurately calculate distance information, these methods use signal characteristics. Other signal technologies, such as infrared, ultrasonic, RFID, etc., which do not be used to calculate the positioning coordinates in more than two dimensions, are beyond the scope of the description.
AOA(Angle of Arrival)
AOA uses the phase angle of multiple antennas to calculate the position. In addition to UWB positioning, it is commonly used for Bluetooth positioning.
The receiving device will be equipped with a "pointing antenna" or an "antenna array" to calculate the angle of the "transmitting device" relative to the "receiving device" by using different antennas to receive the same signal from the same transmitting device.The AOA algorithm will define the plane height of the receiving device, and then converge to calculate the coordinates of the transmitting device.
Generally speaking, as long as the antenna array is properly configured and the scanning frequency is high enough, the AOA algorithm can accurately locate and is not affected by the interior decoration. The disadvantage is that the longer the distance between the transmitting device and the receiving device, the greater the error value. Moreover, because the receiving equipment is equipped with an antenna array, the equipment cost is relatively high. In addition, the development and use of AOA technology is also difficult.
RSSI(Received Signal Strength Indicator)
When the "receiving device" receives signals from different "Anchors", the different transmission distances will cause different levels of signal attenuation. The characteristic of the RSSI algorithm is to calculate the distance between the receiving device and the individual Anchor through the attenuation of the received signal. The monitoring software uses the "triangulation formula" to calculate the coordinates of the receiving device.
For example, if the RSSI value for a distance of 1 meter is known, then greater than this value means that the distance is less than 1 meter, and less than this value means that the distance is greater than 1 meter. By deploying multiple Anchors, we can find the approximate area of the receiving device's location through the relative distance from two or more Anchors (triangulation formula).
However, when there are any factors in the room that will cause signal attenuation, the calculation results will be inaccurate, such as complicated decorations and crowds. And because the signal strength is not nonlinear, the practicability of RSSI is limited. It is difficult to improve the positioning accuracy using this algorithm, and the positioning deviation will fall approximately 3-5 meters. Even with a good algorithm, the positioning accuracy cannot be improved too much. Therefore, it is mostly used in regional positioning.
For example, Zigbee, the relationship between RSSI and distance is as follows
RSSI = -(10*n*log10(d) + A)
RSSI is the RSSI value (dBm) of the received Zigbee signal
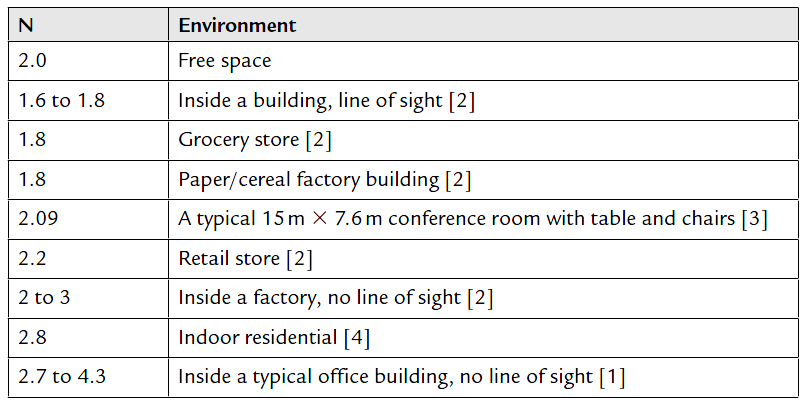
n is the signal loss parameter
d is the distance between the receiving device and the Anchor
A is the RSSI value of the standard distance
The following table is the signal loss reference parameters provided by the Zigbee specification
Note: Our Zigbee positioning system is mainly used in regional positioning. The three-point positioning version uses the value ratio of RSSI to calculate the position, rather than calculating the coordinates after the distance is calculated by the RSSI.